Debugging¶
The PROS API provides various functions, like print() or printf(), that allow your robot to output information to a connected serial console during operation.
To view a robot’s output, there are two officially supported methods:¶
Through the PROS CLI:
Running
pros terminalon the command line will open an output stream from a robot connected over direct USB connection, VEXnet, or JINX.From within Atom:
Click the button labeled “Open cortex serial output”
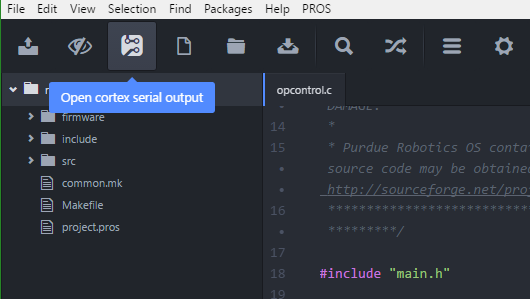
A terminal panel will open at the bottom of the screen containing the output of a connected robot.
Alternate method:¶
Use the serial communication monitor of your choice (such as PuTTY, CoolTerm or this plugin for Visual Studio if using Visual Studio) with the following settings:
- Serial Port: May vary; unplugging and replugging the VEXnet device from the computer should allow you to determine the correct port.
- Baud Rate: 115200
- Encoding: 28591 - ISO-8859-1 - Western European (ISO) or equivalent