Using the GPS with PROS¶
Note
For a non-pros specific usage guide on GPS setup, please visit the VEX Knowledgebase.
Note
For a full list of functions for interacting with the V5 GPS sensor, see its C API and C++ API.
Initialization¶
The GPS (Game Positioning System) Sensor requires some starting parameters to be accurate initially and throughout its path of travel.

The first issue is that initially, the GPS camera may be pointed in a deadzone where the camera won’t be able to see enough of the strip to determine its location. The generalized measured area of the deadzone is depicted below:
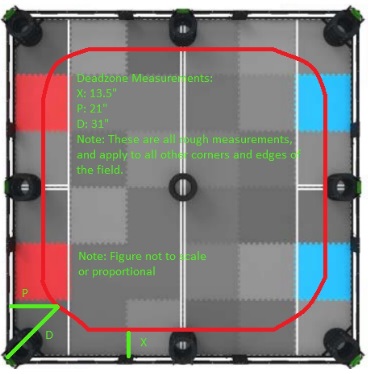
To mitigate this issue, a constructor is available for setting the initial position (in meters) and heading (in degrees) before the GPS achieves a proper lock on the strip. Below, is an example demonstrating proper usage of this with an arbitrary starting location.
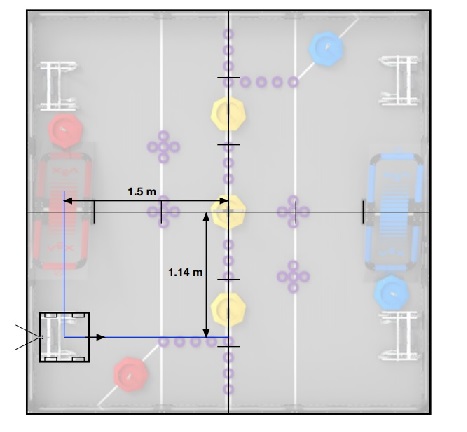
1 2 3 4 5 6 7 8 | #define GPS_PORT 1 void initialize() { pros::Gps gps1(GPS_PORT, -1.5, -1.14, 270); // Center of the field is (0,0), uses 4 quadrant cartesian system for coordinates // This is another example where the position is set after the constructor is called: gps1.set_position(-1.5, -1.14, 270); } |
1 2 3 4 5 | #define GPS_PORT 1 void initialize() { gps_set_position(GPS_PORT, -1.5, -1.14, 270); } |
To make sure that the robot position retains a consistent and accurate value between turns, the offset relative to the center of origin for the GPS has to be set properly.
Note
These numbers were recorded are most likely larger than the actual deadzone, and were found with a change-up field.
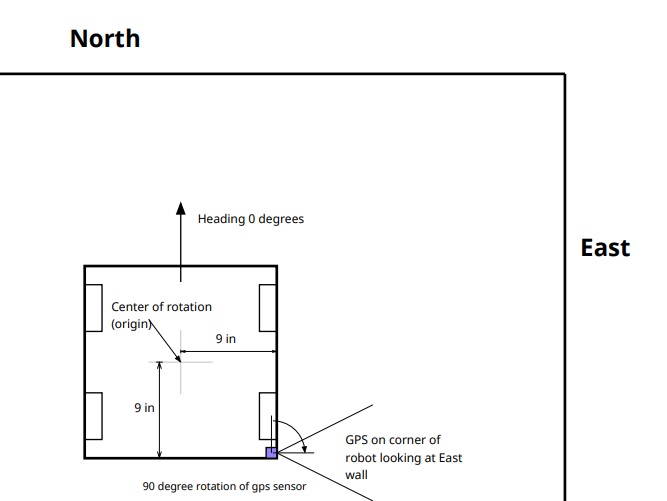
1 2 3 4 5 6 7 8 9 | #define GPS_PORT 1 void initialize() { // Note: 9 inches == .223 Meters pros::Gps gps1(GPS_PORT, .223, -.223); // Center of the field is (0,0), uses 4 quadrant cartesian system for coordinates // Another example where the position and origin are both set in the constructor: pros::Gps gps2(GPS_PORT, -1.5, -1.14, 90, .223, -.223); } |
1 2 3 4 5 | #define GPS_PORT 1 void initialize() { gps_set_origin(GPS_PORT, .223, -.223); } |
Retrieving Data¶
The meaning of the data retrieved by gps_get_status (C API) or .get_status() (C++ API) is
displayed below:
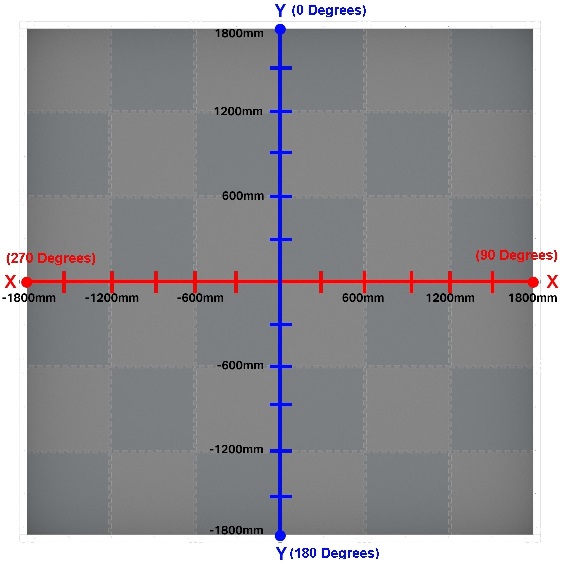
Since the GPS data is returned in a struct, we must retrieve the data from the struct every iteration and access each member individually from that struct.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 | #define GPS_PORT 1 void opcontrol() { pros::Gps gps1(GPS_PORT); pros::gps_status_s_t gpsData; while (true) { gpsData = gps1.get_status(); pros::screen::print(TEXT_MEDIUM, 1, "X Position: %3f", gpsData.x); pros::screen::print(TEXT_MEDIUM, 2, "Y Position: %3f", gpsData.y); pros::screen::print(TEXT_MEDIUM, 3, "Pitch: %3f", gpsData.pitch); pros::screen::print(TEXT_MEDIUM, 4, "Roll: %3f", gpsData.roll); pros::screen::print(TEXT_MEDIUM, 5, "Yaw: %3f", gpsData.yaw); pros::delay(20); } } |
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | #define GPS_PORT 1 void opcontrol() { pros::gps_status_s_t gpsData; while (true) { gpsData = gps_get_status(GPS_PORT); screen_print(TEXT_MEDIUM, 1, "X Position: %3f", gpsData.x); screen_print(TEXT_MEDIUM, 2, "Y Position: %3f", gpsData.y); screen_print(TEXT_MEDIUM, 3, "Pitch: %3f", gpsData.pitch); screen_print(TEXT_MEDIUM, 4, "Roll: %3f", gpsData.roll); screen_print(TEXT_MEDIUM, 5, "Yaw: %3f", gpsData.yaw); delay(20); } } |